
“Lunes otra vez… sobre la ciudad… la gente que ves… vive en soledad“. Así empezaba una canción muy conocida de Sui Generis, que más o menos ejemplifica lo que ha sido esta mañana, salvo que hay poca gente en las calles por las vacaciones de invierno, así que para empezar con todo, un tema muy pum! para arriba!!
Y nosotros seguimos con la cuarta parte de este tema de la visión por computadora y su uso en vehículos.
Verificación de la hipótesis (HV)
Las entradas para la HV son las localizaciones hipotetizadas por el HG. Durante la HV, muchas pruebas son utilizadas para verificar la veracidad de la hipótesis.
Las HV se clasifican en dos grandes grupos, 1) métodos basados en templates, y 2) métodos basados en la apariencia
1- Métodos Basados en Templates
Patrones predefinidos de clases de vehículos son usados para correlacionar la imagen con alguno de ellos. Algunos de estos templates en la práctica son bastante lasos, y otros muy estrictos.
Hay algunos de ellos que ubican la patente junto con la ventana trasera basados en la geometría del vehículo, mientras que otro propone que se busque una forma en “U” (una base, dos laterales y dos esquinas uniendo los laterales con la base).
La discusión estaba dada que la apariencia visual del objeto depende directamente de la distancia del mismo a la cámara; y finalmente se estandarizó el uso de dos modelos distintos, uno para objetos cercanos y otro para objetos lejanos.
Definieron así un vehículo como simétrico, caracterizado por límites de prisma rectangular que satisface ciertas relaciones de aspecto.
2- Métodos Basados en la Apariencia
Las características de cada clase de vehículo pueden ser aprendidas mediante un set de imágenes de entrenamiento que capturan la variabilidad en la apariencia de un vehículo.
Usualmente, la variabilidad de las formas que no son vehículos también son modeladas para mejorar la performance general.
Primero, cada imagen de entrenamiento es representada por un set local o global de características. Luego, la diferenciación entre clases de vehículos y no-vehículos es hecha, ya sea por un “clasificador” (como una red neuronal) o por modelación de la distribución de probabilidad de aparición de cada característica de cada clase (como la distribución Gaussiana).
Los problemas rodeantes
Comprender lo que pasa en el ambiente conlleva comprender también lo que afecta directa e indirectamente a la visión por computadora. Estas variaciones son dadas por:
- Ruidos de la cámara (es decir valores fluctuantes de los píxeles que no están de acorde a los valores esperados),
- Cambios en la intensidad de iluminación (desde los más sutiles hasta los más graves, por ejemplo el hecho de navegar por una carretera iluminada cada 100 metros no es lo mismo que dicha carretera a las 14:00 hs de una tarde con cielo despejado)
- Ajustes dinámicos del equipamiento de captación de imágenes (como los estabilizadores o amortiguadores de lentes)
- Bordes no muy definidos o cambiantes rápidamente (como las copas de los árboles al vaivén del viento)
- Sombras que se mueven (un pájaro que pasa volando a baja altura proyecta una sombra que dadas circunstancias especiales puede ser confundida con otro tipo de objeto)
- Objetos que se mueven (un camión de doce ejes no es lo mismo ni se mueve de manera similar que un ciclista; inclusive dos peatones no se mueven igual)
Los primeros tres representan “false motions”, el cuarto y el quinto se toma como movimientos no interesantes o que no deberían ser tenidos en cuenta; sólo el último de los puntos nombra define la reacción que se debe tener.
Además de estos, se tiene que considerar los aspectos del mismo camino o vía en la que se tiene que desplazar el vehículo, la cual puede estar o no señalizada, puede tener más de una mano, más de una vía, más de un cruce, glorietas, rotondas, desvíos, puntos ciegos … Hasta un bache puede ocasionar que nuestra visión no es correcta.
Veamos a continuación varias de las cosas que venimos contando en detalle para ir ampliando nuestra visión.
La diferencia del día a la noche
Todo lo que vamos nombrando, los métodos y las técnicas asumen que se tienen condiciones de luz favorables donde uno puede identificar fácilmente la imagen de un vehículo de las zonas muertas (como los fondos). Con poca luz, o directamente en la noche, esto ya no es tan sencillo, porque no sólo afecta la inconsistencia de la luz ambiente, sino también que afecta las luces de los faros delanteros y traseros a las cámaras. Así que dependemos de un algoritmo robusto que pueda manejar estas situaciones.
En la actualidad, a las cámaras comunes se suma la coparticipación de uno o más sensores de tipo sonar, en especial para los momentos nocturnos y ubicaciones de objetos en una distancia menor de 10 metros.
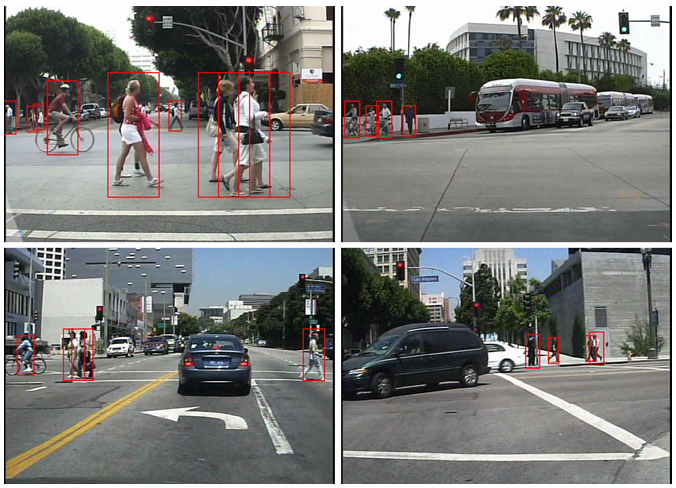
Detectando Peatones
En la mayoría de los casos, uno de los obstáculos que nos encontramos en los caminos son los peatones.
Reconocerlos y diferenciar cuales de ellos son relevantes para el vehículo es importante pero no fácil, y para esto se considera dentro de los algoritmos una representación del riesgo que cada uno de ellos representa.
Además, hay no sólo que reconocerlo, sino reconocer la pose del peatónpara inferir su futuro movimiento de acuerdo a lo que a se viene conociendo. También, percibir e interpretar como se mueve un grupo de personas correctamente ayudará a dar una respuesta correcta del curso de acción del vehículo.
Para que la visión de computadora pueda reconocerlos se necesitará tener en clarocuánto y cuando se deben buscar. Por lo general se utiliza un algoritmo que ubique al peatón e infiera su movimiento relativo con respecto al vehículo. Pero están expuestos a muchos fallos.
Vehículos Especiales, su Diferenciación
Hay que tener en cuenta, dentro de lo que tiene que reconocer la visión por computadora en los vehículos, que existen ciertos tipos de vehículos, que se mueven de forma que no se ubican dentro de la media normal del tráfico. Estos son las ambulancias, las patrullas policíacas y los camiones de bomberos entro otros. Estos vehículos especiales son todos aquellos que por un motivo de emergentología deben moverse con celeridad a través del tráfico.
Ellos ignoran muchas veces las reglas de vialidad, en pos de un objetivo más humanitario, pero, para nosotros deben ser incluidos en nuestros modelos algorítmicos. Sin embargo, los métodos que mencionamos poco hacen para reconocerlos, ya que no es sencillo y son confundidos con otros vehículos generales.

Debemos, entonces agregar a nuestro modelo las características especiales, como ser señalética específica de estos vehículos, sus colores, su movimiento, sus marcas y modelos de vehículos (por lo general son muy semejantes) y hasta la habilidad de distinguir la sirena mediante la vista de las luces.
Es uno de los pocos casos donde un falso positivo simplemente indicará dejar pasar una camioneta que no tiene nada ene especial, pero donde un falso negativo detendrá la corrida de una ambulancia al hospital con un paciente crítico.
Seguimos la próxima semana.
